Crab-like microscopic grippers move cells in response to biochemical signals
Crab-like microscopic robots can be used to grip cells in response to chemical triggers, US scientists have shown. The remote-controlled ’microgrippers’ - which the team have already demonstrated can pick up tiny beads and tubes - are a step towards devices that could perform surgery or high-tech engineering under the microscope.
’Currently, micromachinery is actuated by electrical, pneumatic or hydraulic signals - which means they need to be connected up with wires or batteries,’ says David Gracias, who led the research team at Johns Hopkins University, Baltimore, US. This makes current micromachinery bulky, expensive to fabricate and difficult to manoeuvre in hard-to-reach places - since the wiring often needs to be fed through tubing to the target location.
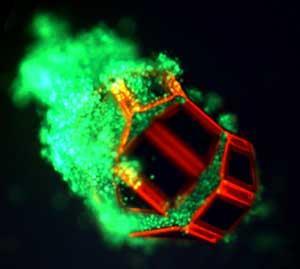
Gracias’ new robots measure only a few tenths of a millimetre, and resemble an outstretched hand with jointed fingers - the makeup of the joints inspired by crabs. Each joint contains a pre-stressed metal layer held in place by an organic polymer. This design effectively makes the joints ’spring-loaded’, so that the hand automatically closes into a fist when the organic polymer softens. Triggering the polymer to soften can occur under a range of conditions, such as gentle heating or exposure to specific biochemicals.
’Biology utilises machines that respond to biochemical cues,’ Gracias told Chemistry World. ’In the same way, our microgripper can be triggered to close when exposed to a specific environment. This suggests a strategy that will allow us to construct functional micro-tools that can respond to biochemical signals.’
The robots also have the potential to be moved around by magnets, or wirelessly heated by electromagnetic fields, Gracias adds. They were also demonstrated to have a firm grip - capable of extracting cell samples from cow bladder tissue and retrieving microscopic beads from a surface.
’This is very interesting research that shows great potential for further investigation,’ says David Wood, who works at the microsystems technology group, Durham University, UK. ’From an engineering perspective, the design of these machines is quite simple and elegant.’
But there are still many challenges to overcome before the technology can be put to effective use. Firstly, the gripping action is not reversible under biological conditions, meaning that the robots can only be used once. Also, real biological systems contain a wide range of environments, so ensuring that the grippers trigger in the right place could prove difficult.
Although the triggering mechanisms are biologically safe, whether or not the metal-based robots would get stuck in other tissues remains an important question, so extensive testing would be required before they could be put to use.
The next goal is to reduce the size of the microgrippers, Gracias says. When closed, they are currently around 15-20 times larger than a mammalian cell - so the new challenge is to reduce this down to the size of a single cell.
Lewis Brindley
Enjoy this story? Spread the word using the ’tools’ menu on the left.
References
et al, Proc. Natl. Acad. Sci.et alJ. Am. Chem. Soc.130, 17238 (DOI: 10.1021/ja806961p)



No comments yet