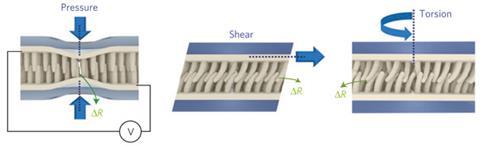
Korean scientists have developed a skin-like flexible strain sensor made from interlocking forests of nanofibres. The sensor can distinguish between direct pressure, shear and twisting forces; is sensitive enough to monitor human pulse rates (video) and the impact of a single water droplet; and can resolve forces from multiple objects applied to different points on the surface at the same time.
Kahp-Yang Suh from Seoul National University explains that his team took inspiration from beetles’ wing-locking mechanism. ‘A beetle folds its wings at rest by mechanically interlocking two microhair arrays called microtrichia on the outer wing and inner body,’ says Suh. These makes it relatively easy for the beetle to lift its wings straight off the body, but the large contact surface area means any sliding generates a large shear force between the hairs, stopping the wing from moving around.
To test out their sensor, the team strapped it to the wrist of a willing volunteer and used it to measure the frequency and magnitude of their pulse before and after a set of press-ups. They also covered one side of the sensor with a superhydrophobic coating and measured the pressure from a 20µl water droplet bouncing up and down on it from an initial height of 5cm.
In a second version of the sensor, the team connected 64 smaller patches together. This allowed them to map the pressure from two ladybirds placed on different areas of the sensor. Suh points out that this array-type sensor requires much more complex circuitry, both within the sensor and to process and transmit the output, and this would need to be miniaturised for such sensors to be useful.
‘The results are notable for three reasons,’ says John Rogers, who develops flexible electronic devices at the University of Illinois in Urbana-Champaign, US. ‘The extreme sensitivity of the tactile sensors; the ability to combine these sensors into addressable arrays for spatial mapping; and the demonstrated flexible mechanics, which facilitates their integration with the surface of the skin.’
As well as being used for advanced surgical tools and monitoring devices, Rogers suggests that the technology could be used to develop systems for enhanced sensory perception. Suh agrees, saying that he is already talking with a biorobotics expert about using the sensor in a robot’s skin to help control its grip. ‘It should be possible to execute different functions such as shaking, gripping and touching by distinguishing different physical signals applied to the robot skin,’ he says.
References
- C Pang et al, Nat. Mater., 2012, DOI: 10.1038/nmat3380



No comments yet