
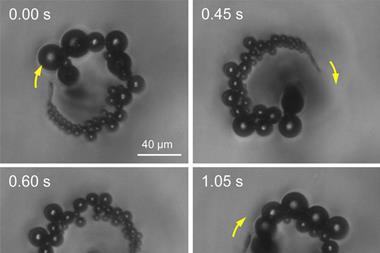
The motors are microtubes that contain a platinum catalyst and iron. The catalyst reacts with hydrogen peroxide to produce a jet of oxygen bubbles to drive the tube forward and the iron allows the tubes to react to a magnet. Gaining control of the direction in which the tubes travel is the challenge, and now scientists have found a way to manipulate the direction using magnets. This is a step towards a future in which they could be used inside the body, as engines in nanoscale systems or for environmental remediation.
Martin Pumera, who is based at Nanyang Technological University, Singapore, and his team, worked with researchers from the Leibniz Institute for Solid State and Materials Research Dresden, Germany, to make the micromotors. First they deposited thin layers of titanium, iron, chromium and platinum on a support. Once the support was removed, the layers rolled into a tube. Next, the microtubes were made into permanent magnets, using a neodymium magnet, and put into a hydrogen peroxide solution to test their reaction to external magnets.
Pumera explains that ‘the most exciting part was finding out that the microjets can sense the magnetic field from a large distance and autonomously move towards it and away from it’. Not being able to control the micromotors remotely had been a limitation in putting them to use.
Ayusman Sen, an expert in nanomotors from Pennsylvania State University, US, thinks this is an elegant way of controlling the micromotors and comments that in the future ‘multi-functional micromotors are expected to create new opportunities in situations that require exquisite control over the directionality of motion, such as drug delivery and minimally invasive surgery’.
Next, Pumera’s team will be working towards using the micromotors in real systems. ‘The ultimate goal of the field is to create a self-propelled, easy-to-navigate, autonomous device that can move in real-world environments,’ he says.




No comments yet