
Gripping and manipulating sub-millimetre objects is a tricky problem in microrobotics. Mechanical grasping is difficult at micro level, and techniques such as micro-machined grippers, although very accurate, need to be tethered to a control system and so are unsuitable for work in confined spaces.
To overcome these problems, Metin Sitti and his team from the Max Planck Institute in Germany have developed an untethered microgripper, which uses surface tension, rather than mechanical means, to grab small parts, such as a hair, a cloth fibre or a piece of muscle tissue. The gripper works in an aqueous environment, can grab both hydrophilic and hydrophobic items and, unlike other systems, does not need to be customised to fit to the item.
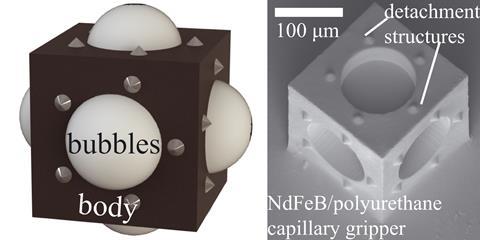
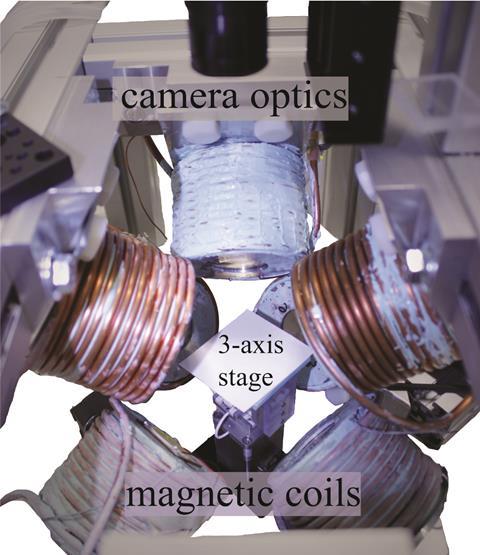
The gripper takes the form of a cube with sides measuring just 200µm. 3D printed from a mixture of magnetic neodymium alloy particles and polyurethane, the gripper can be moved using electromagnetic coils. A cavity in the cube captures a bubble of air when the cube is immersed in water. When this bubble is brought up against another object, capillary forces stick the object to the cube.
To make the gripper release its cargo, the researchers increase the system’s pressure , compressing the bubble within the cavity and peeling it from the cargo’s surface. Small bumps on the gripper’s surface prevent too much adhesion to the cargo item.
Sitti got the idea for a surface tension gripper when he noticed that other microrobots he had designed in the past would sometimes get stuck on water surfaces. ’We determined that the robots were becoming attached to small air bubbles that occurred naturally when preparing the workspace. We then investigated how we could use these strong forces on the micron scale for gripping and releasing parts,’ he explains.
The system’s ability to grip objects of different shapes and sizes means that it could have uses in many different areas. Guangbo Hao, expert in robotics and their applications in precision engineering at University College Cork, Ireland has high hopes for the applications of this system: ’The proposed method creates a new or alternative effective solution for tissue fabrication, micromachining, and minimal invasive surgery.’
Sitti aims to improve the release mechanism by using local temperature control to change the bubble size. He also has ambitions to develop a system with two separately controlled grippers.
References
This article is free to access until 20 December
J Giltinan, E Diller and M Sitti, Lab Chip, 2016, 16, 4445-4457 (DOI: 10.1039/C6LC00981F)













No comments yet